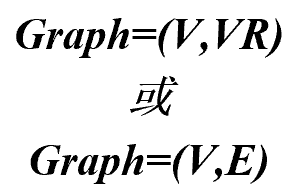
基本概念 由顶点集合V和一个描述顶点之间关系—-边的集合VR(或E)组成。
图的定义
V:顶点(数据元素)的有穷非空集合。
VR(或E):弧(关系)的有穷集合。
相关术语 顶点 数据元素所构成的结点。
有向图 弧的顶点偶对是有序的。
无向图 弧的顶点偶对是无序的。
(无向)完全图 每个顶点与其余顶点都有边的无向图。
有向完全图 每个顶点与其余顶点都有弧的有向图。
稀疏图 有很少边或弧的图。(e<nlogn)
稠密图 有较多边或弧的图。
权 图中的边或弧具有一定的大小的概念。
网 边/弧带权的图。
邻接 有边/弧相连的两个顶点之间的关系。
关联(依附) 边/弧与顶点之间的关系。
顶点的度 与该顶点相关联的边的数目,记为D(v)。
仅1个顶点的入度为0,其余顶点的入度均为1时为树形
子图 对于图G=(V,E)和G’=(V’,E’),如果V’属于V,E’属于E,且E’关联的顶点都在V’中,则称G’是G的子图。
生成子图 由图的全部顶点和部分边组成的子图称为原图的生成子图。
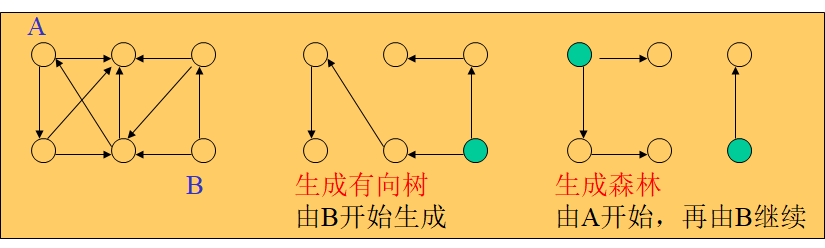
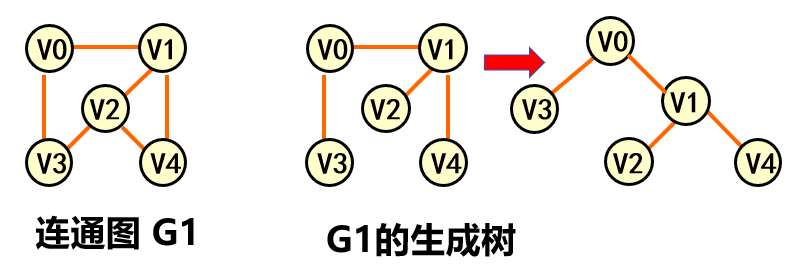
生成树 包含图中全部顶点的极小连通子图。
生成有向树 图中恰有一个顶点入度为0,其余顶点入度均为1。
生成森林 有向图中,包含所有顶点的若干棵有向树构成的子图。
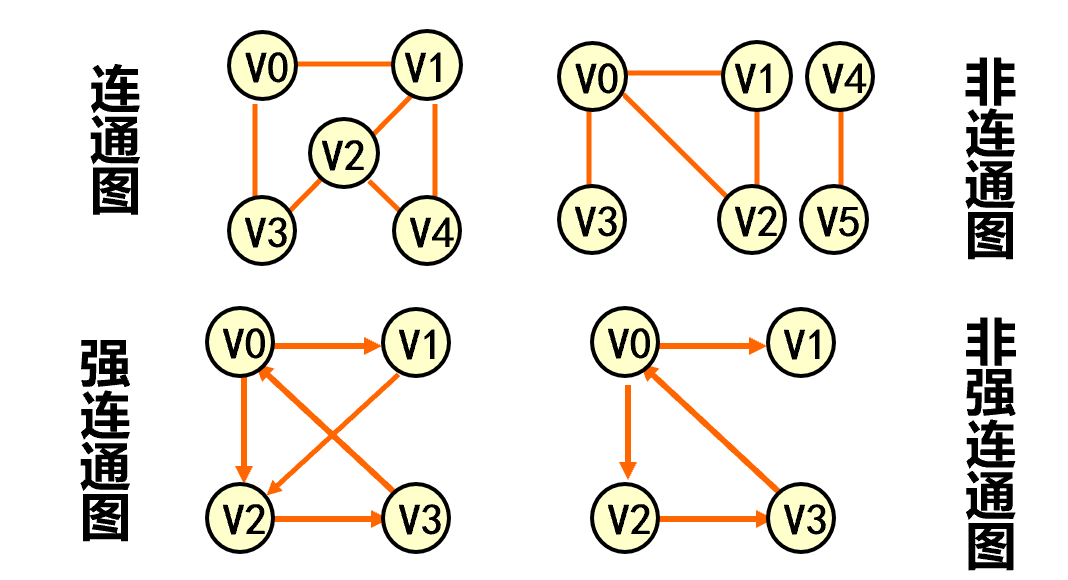
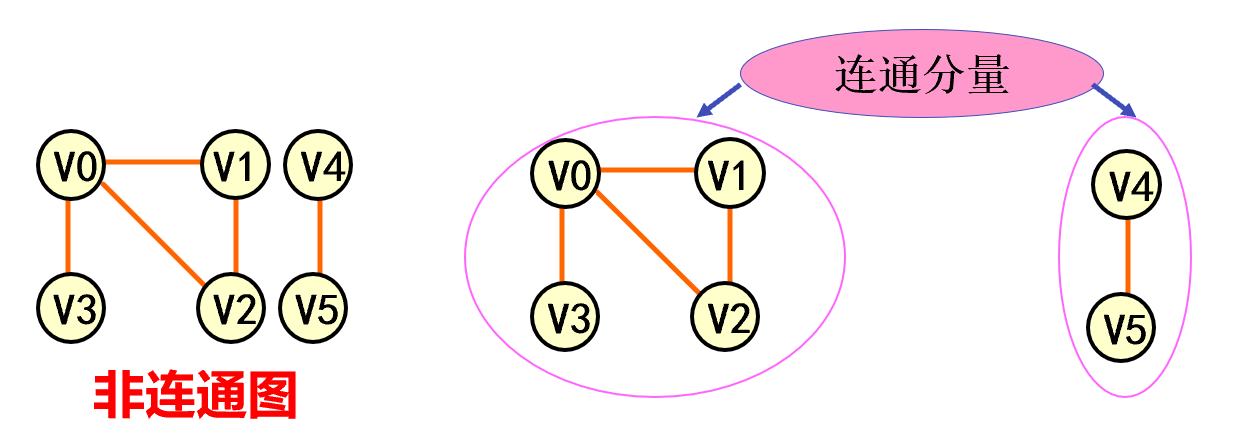
连通图(强连通图) 在无向图G=( V, {E} )中,若对任何两个顶点 v、u 都存在从v 到 u 的路径,则称G是连通图。
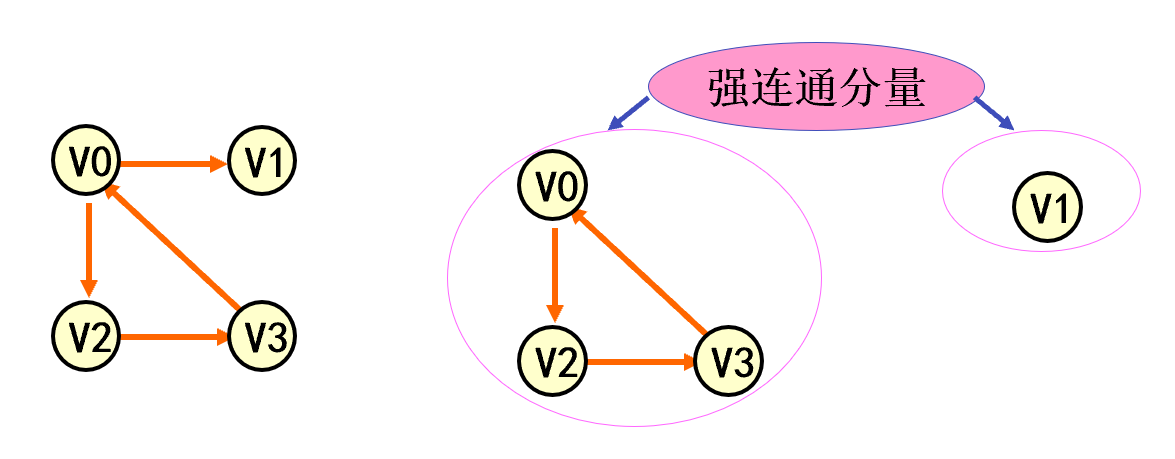
在有向图G=( V, {E} )中,若对任何两个顶点 v、u 都存在从v 到 u 的路径,则称G是连通图强连通图。
连通分量 无向图G 的极大连通子图称为G的连通分量。
极大连通子图意思是:该子图是 G 连通子图,将G 的任何不在该子图中的顶点加入,子图不再连通。
强连通分量 有向图G 的极大强连通子图称为G的强连通分量。极大强连通子图意思是:该子图是G的强连通子图,将G的任何不在该子图中的顶点加入,子图不再是强连通的。
存储结构 顺序存储结构(数组表示法(邻接矩阵))
建立一个顶点表(记录各个顶点信息)和一个邻接矩阵(表示各个顶点之间关系)。
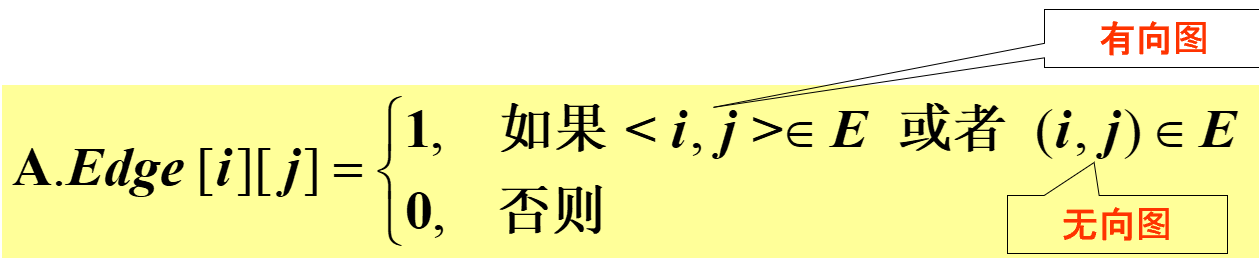
设图 A = (V, E) 有 n个顶点,则图的邻接矩阵是一个二维数组 A.Edge[n][n],定义为:
邻接矩阵 无权图用1表示有边,0表示无边;网(有权图)用边权表示有边,∞表示无边
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 #define INFINITY INT_MAX // 最大值 #define MAX_VERTEX_NUM 20 // 最大顶点个数 typedef enum{DG, DN, UDG, UDN} GraphKind; //有向图、有向网、无向图、无向网,四种图类型 typedef int VertexType; //顶点携带信息的类型,假设为整数 typedef struct ArcCell { VRType adj; // 顶点关系类型,对无权图用0或1在矩阵中 //的行号和列号对应的顶点是否相邻。对带权图,则为边或弧的权值。 InfoType * info; // 该弧的相关信息指针 }ArcCell, AdjMatrix[MAX_VERTEX_NUM ][MAX_VERTEX_NUM ]; typedef struct { VertexType vexs[MAX_VERTEX_NUM]; // 顶点向量 AdjMatrix arcs; // 邻接矩阵 int vexnum, arcnum; // 图的当前顶点数和弧数 GraphKind kind; // 图的种类标志 }MGraph;
总结 优点:容易实现图的操作 ,如:求某顶点的度、判断顶点之间是否有边、找顶点的邻接点等等。
缺点:n个顶点需要n*n个单元存储边;空间效率为O(n^2)。
对稀疏图而言尤其浪费空间 。
链式存储结构(多重链表) 邻接表、邻接多重表、十字链表
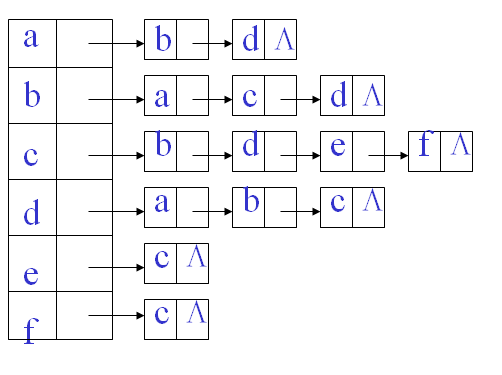
邻接表 图的一种顺序存储与链式存储结合的存储方法。
空间效率为:O(n+2e)
邻接表的逻辑概念:将顶点V的邻接点放入一个线性表(采用链式实现)存储
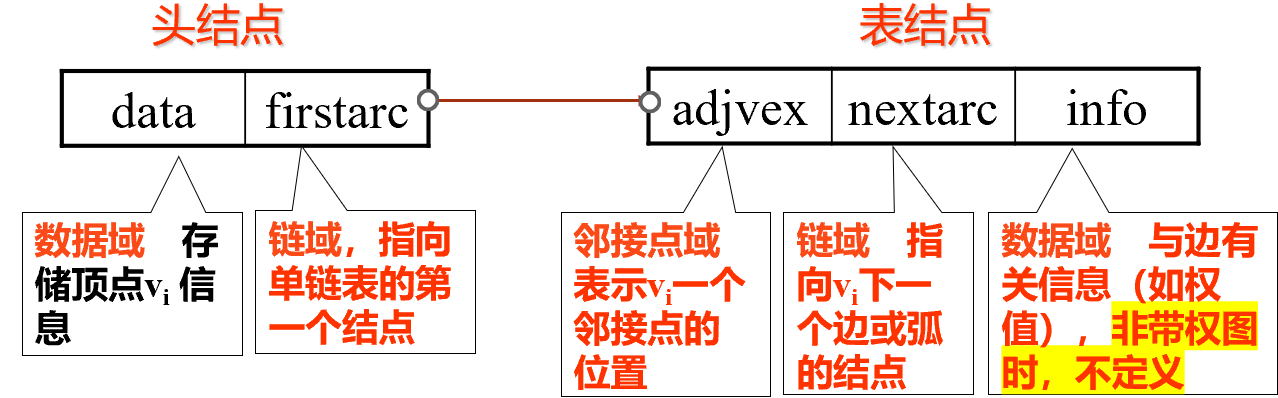
邻接表(链式)表示法 v对每个顶点vi 建立一个单链表,把与vi有关联的边的信息链接起来,每个结点设为3个域;边表。
每个单链表有一个头结点(设为2个域),存vi信息
用来记录顶点信息的头结点,用顺序存储结构保存为一个数组,顶点顺序表(顶点表)。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 #define MAX_VERTEX_NUM 20 // 最大顶点个数 typedef enum{DG, DN, UDG, UDN} GraphKind; // 四种图类型 typedef int VertexType; //顶点携带信息的类型,假设为整数typedef struct ArcNode { int adjvex; //该边的另外一个顶点 //或弧所指向的顶点的位置 struct ArcNode * nextarc ; //指向下一条边或弧的指针 int weight; //边或弧的权重,网类型时使用 InfoType * info; //该弧的其它相关信息的指针 }ArcNode; typedef struct VNode { VertexType data; // 顶点信息 ArcNode * firstarc ;//指向第一条依附该顶点的弧 //或该顶点的第一条边的指针 /即头结点的指针域 }VNode, AdjList[MAX_VERTEX_NUM ]; typedef struct { AdjList vertices; // 顶点向量 int vexnum, arcnum; // 图的当前顶点数和弧数 GraphKind kind; // 图的种类标志 }ALGraph;
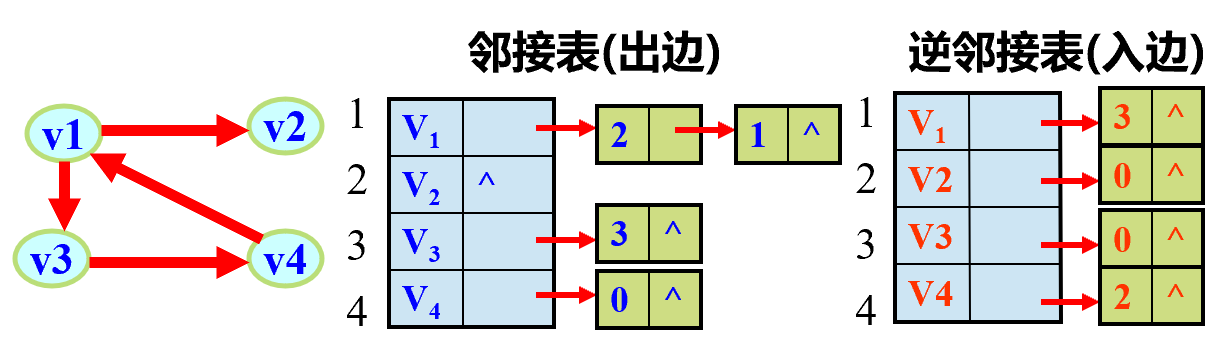
有向图的邻接表和逆邻接表 空间效率为O(n+e)
出度:OD(Vi)=单链出边表中链接的结点数
入度:ID(Vi)=邻接点域为Vi的弧个数
度:TD(Vi) = OD( Vi ) + I D( Vi )
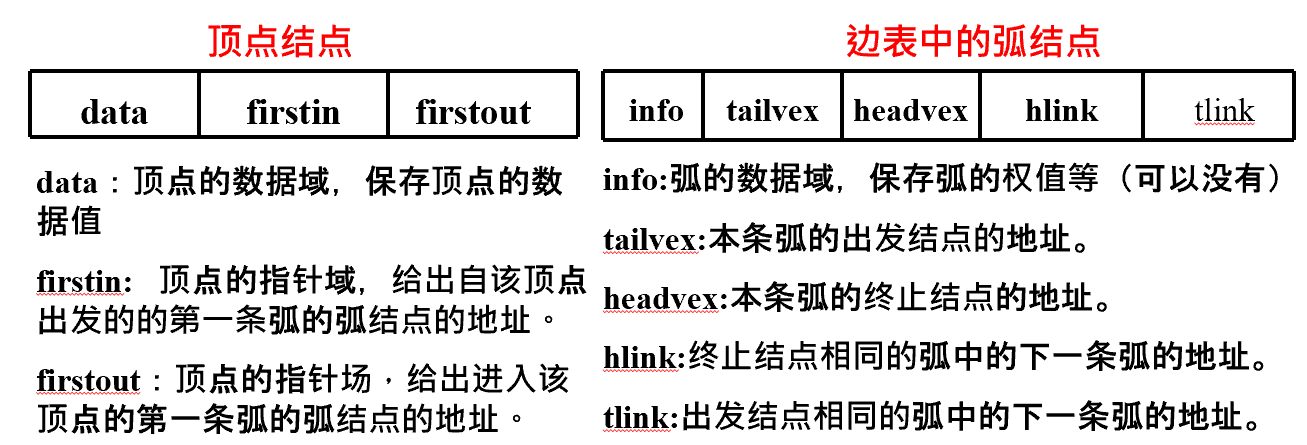
十字链表 适用对象为有向图 ,顺序存储+链式存储
对矩阵中每个非零元素存储为一个结点,结点由5个域组成,其中:row域存储非零元素的行号,col域存储非零元素的列号,v域存储本元素的值,right,down是两个指针域,从行方向、列方向链接起来。
核心思路:一条链表记录结点指向了谁,另一条链表记录谁指向了当前结点。
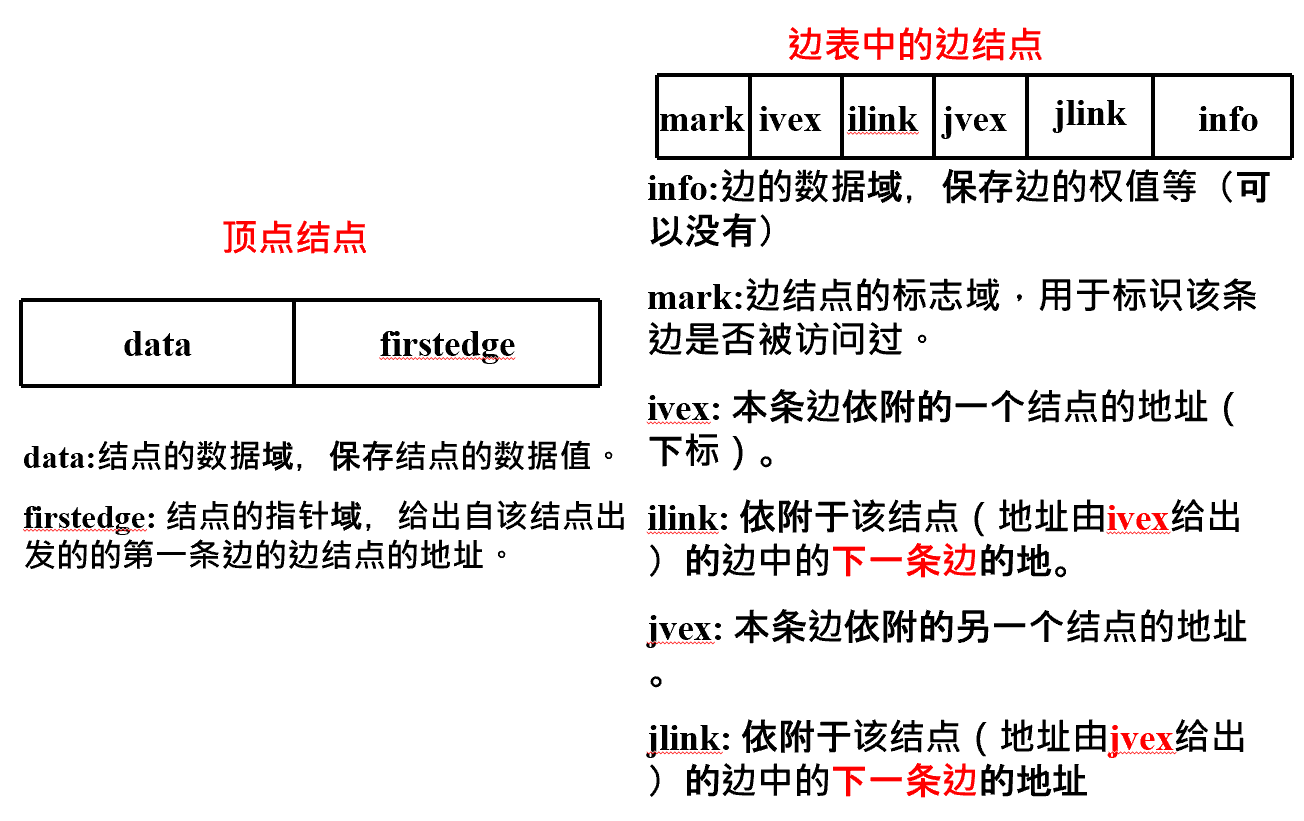
邻接多重表 适用对象为无向图 ,顺序存储+链式存储
核心思路:每条边对应一个结点,方便无向图中对边的操作。
图的遍历 (dfs)深度优先遍历 (树的先根遍历的推广)
(bfs)广度优先遍历 (树的按层次遍历的推广)
遍历定义:从已给的连通图中某一顶点出发,沿着一些边访遍图中所有的顶点,且使每个顶点仅被访问一次
深度优先搜索DFS 递归的算法思想
访问顶点v,并记录v已被访问
依次从v的未访问的邻接点出发,递归进行深度优先搜索图G
在顶点表中是否还有未访问的顶点,有则将未访问结点赋值到v,回到1;没有则算法结束。
只要将v的邻接点都递归访问完,那么v所在的连通分量中的顶点就都会被访问到。对非连通图,依次对每个连通分量进行就可以完成图的DFS
非递归的算法思想
访问一个顶点,并记录它已被访问;将它的所有未访问的邻接顶点入栈
如果栈空,则退出;否则,栈中一顶点出栈;
如果该顶点已被访问过,则转2 否则,转1
广度(宽度)优先遍历BFS 算法思想:
访问顶点v,并记录它已被访问;顶点v入队列;
如果队列空,则退出;否则,从队中取出一顶点
求该顶点的一个邻接点;如果此邻接点未被访问,则访问它,并记录它已被访问,将其入队列;
如果该顶点还有下一个邻接点,则转(3);否则,转(2)
连通性问题 子图相关术语 生成子图 由图的全部顶点和部分边组成的子图称为原图的生成子图。
极小连通子图 该子图是G 的连通子图,在该子图中删除 任何一条边,子图不再连通。
生成树 包含无向图G 所有顶点的极小连通子图。
生成森林 对非连通图,由各个连通分量的生成树的集合。
生成树的概念(从遍历的角度看) 设G=(Vn,En),则从图中任一顶点进行遍历图时,必定将En分成两个集合T(G)和B(G),其中T(G)是遍历时经过的边的集合,B(G)是剩余边的集合。T(G) 是的G的一棵生成树。因此只有n-1条边
因此,一个图的生成树是不唯一的
因为可能从不同的顶点出发
采用不同的存储结构何存储顺序
对于非连通图,通过这样的遍历,将得到的是生成森林
最小生成树 在网的多个生成树中,寻找一个各边权值之和最小的生成树,记为MST(Minimum Cost Spanning Tree)。
基本准则:
必须只使用该网中的边来构造最小生成树;
必须使用且仅使用n-1条边来联结网络中的n个顶点
不能使用产生回路的边
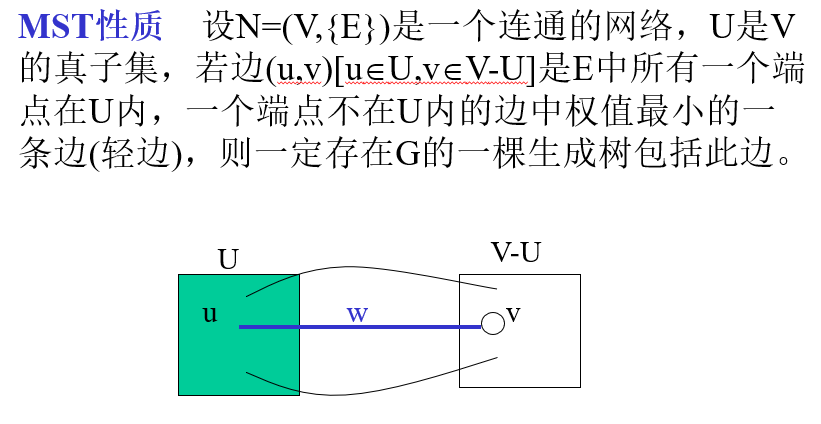
MST性质
生成树一定包含最短连通边?
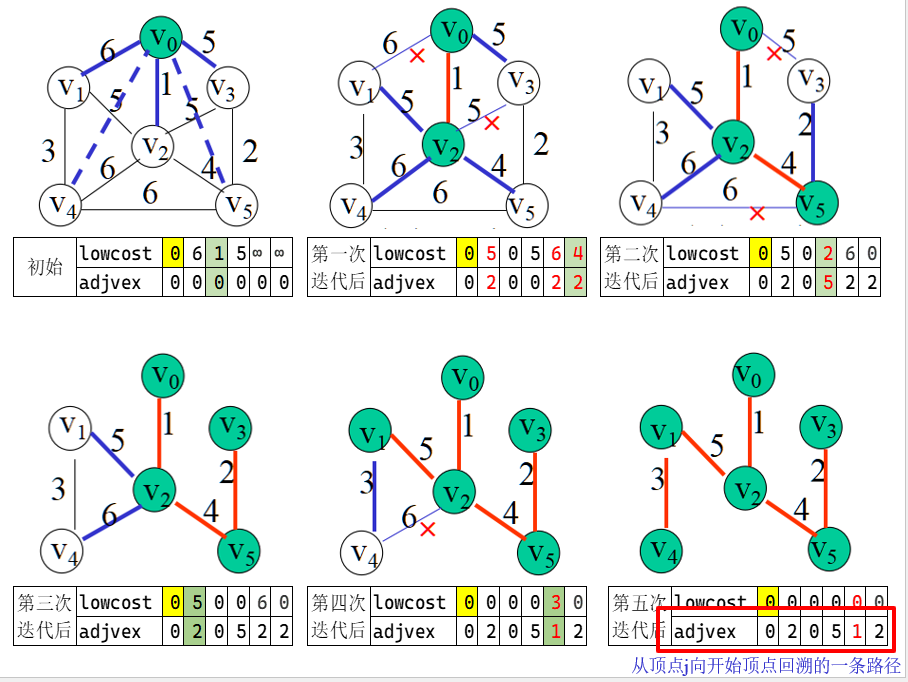
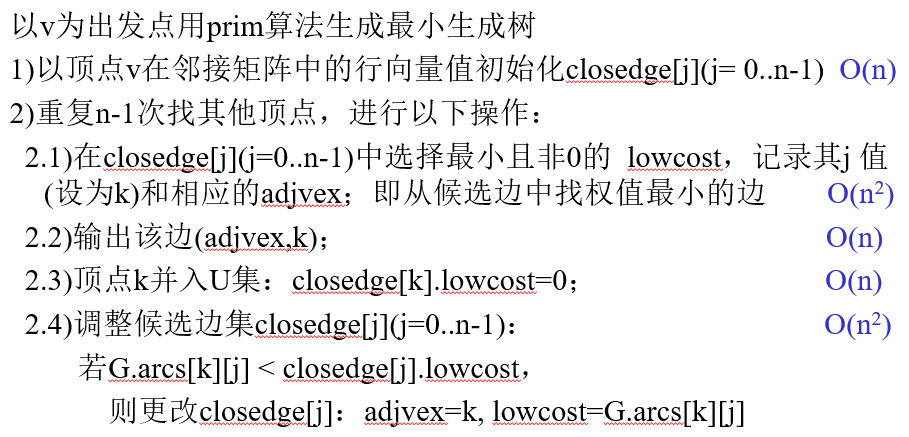
Prim算法 归并顶点,与边数无关,适于稠密网
将图中顶点分为两个集合,其中集合 X 包含图的一个顶点 v0,集合 Y 包含除 v0 外的其它所有顶点;(起始只有一个顶点)
将跨接这两个集合的权值最小的边加入生成树中,并将其依附在集合 Y 中的顶点 v1 从 Y 中移入集合 X 中;**(找可以连接到目前生成树上的最短边及此边连入的顶点)**
反复过程 2,直到集合 Y 为空,所得生成子图即为最小生成树。
存储结构 主空间:带权邻接矩阵G.arcs[n][n]的记录图
辅助空间(记录候选边):数组closedge[i] (i=0…n-1)
算法步骤
调整方法:U中新增顶点k带来的和j关联的边(k,j)权值小就替换已有候选边,因closedge[j]中记录了现在为止权值最小边,新增边与其比较选一个小的即可
以下是O(n^2)算法
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 void Prim(MGraph G, VertexType u ) { //用v和其他结点的边权值初始化辅助数组 k=LocateVex(G,u); for(j=0; j<G.vexnum; ++j) //即为v结点在邻接矩阵的k行数据 closedge[j]={k, G.arcs[k][j].adj}; //在剩余结点中循环, //依次找出最小生成树的边权值最小并且连接U和V-U的边和结点 for (i=1; i<G.vexnum; ++i) { //进行G.vexnum-1次循环 k=minium(closedge); //选择权值最小的边对应的V-U中的顶点 printf(closedge[k].adjvex, k); closedge[k].lowcost=0; //顶点k并入U集 for (j=0; j<G.vexnum; ++j) //用k带来的边调整候选边 if (G.arcs[k][j].adj<closedge[j].lowcost) closedge[j]={k, G.arcs[k][j].adj}; } }//Prim
Kruskal算法 归并边,适于稀疏网
将图中所有边按权值从小到大排序;只使用所有的顶点形成图(n个顶点情况下,形成n个连通分量,即所有顶点互不连通);
取权值最小的边,加入图中,判断是否形成了回路,未形成回路则保留此边;否则去掉该边,重取权值较小的边;(方法:选两个顶点落在不同的连通分量上的最小权值的边)
反复过程2,直到全部顶点均连通为止。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 void MiniSpanTree_Kruskal(MGraph G) { int parent[MAXVEX]; // 用于判断边与边是否形成环路 Edge edges[MAXVEX]; // 存储所有边 int edgeCount = 0; // 初始化parent数组 for (int i = 0; i < G.numVertexes; i++) { parent[i] = 0; } // 将图中的所有边存储到edges数组中 for (int i = 0; i < G.numVertexes; i++) { for (int j = i + 1; j < G.numVertexes; j++) { if (G.arcs[i][j] != INFINITY) { edges[edgeCount].begin = i; edges[edgeCount].end = j; edges[edgeCount].weight = G.arcs[i][j]; edgeCount++; } } } // 按权值对边进行排序 for (int i = 0; i < edgeCount - 1; i++) { for (int j = i + 1; j < edgeCount; j++) { if (edges[i].weight > edges[j].weight) { Edge temp = edges[i]; edges[i] = edges[j]; edges[j] = temp; } } } printf("边 \t权重\n"); // 选择边并构建最小生成树 for (int i = 0; i < edgeCount; i++) { int n = Find(parent, edges[i].begin); int m = Find(parent, edges[i].end); if (n != m) { Union(parent, n, m); printf("(%c, %c) \t%d\n", G.vexs[edges[i].begin], G.vexs[edges[i].end], edges[i].weight); } } }
在Kruskal算法中,判断图中是否产生回路的依据是使用并查集(Union-Find)数据结构。
1 2 3 4 5 6 7 8 int Find(int *parent, int f) { while (parent[f] > 0) f = parent[f]; return f; } void Union(int *parent, int i, int j) { parent[i] = j; }
破圈法
在图中找到一个回路
去掉该回路中权值最大的边
反复此过程,直到图中不存在回路为止
去边法(感觉跟破圈没多大区别)
将图中所有边按权值从大到小排序
去掉权值最大的边,若图不再连通则保留此边,再选取下一权值较大的边去掉
反复此过程,直到图中只剩下n-1条边
完整代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 #include <stdio.h> #include <limits.h> #define MAXVEX 100 // 最大顶点数 #define INFINITY INT_MAX // 表示无穷大 typedef char VertexType; // 顶点类型 typedef int EdgeType; // 边上的权值类型 typedef struct { VertexType vexs[MAXVEX]; // 顶点表 EdgeType arcs[MAXVEX][MAXVEX]; // 邻接矩阵 int numVertexes, numEdges; // 图中当前的顶点数和边数 } MGraph; typedef struct { VertexType adjvex; // 依附的U集合中的顶点 EdgeType lowcost; // 当前轻取边的权值 } Closedge[MAXVEX]; void Prim(MGraph G, VertexType u) { Closedge closedge; int k = 0; // 初始化closedge数组 for (int j = 0; j < G.numVertexes; j++) { if (j != u) { closedge[j].adjvex = u; closedge[j].lowcost = G.arcs[u][j]; } } closedge[u].lowcost = 0; // 初始顶点u加入U集合 // 选择n-1条边 for (int i = 1; i < G.numVertexes; i++) { int min = INFINITY; for (int j = 0; j < G.numVertexes; j++) { if (closedge[j].lowcost != 0 && closedge[j].lowcost < min) { min = closedge[j].lowcost; k = j; } } // 输出当前选择的边 printf("边 (%c, %c) 权值: %d\n", G.vexs[closedge[k].adjvex], G.vexs[k], closedge[k].lowcost); closedge[k].lowcost = 0; // 将k加入U集合 // 更新closedge数组 for (int j = 0; j < G.numVertexes; j++) { if (G.arcs[k][j] < closedge[j].lowcost) { closedge[j].adjvex = k; closedge[j].lowcost = G.arcs[k][j]; } } } } int main() { MGraph G; G.numVertexes = 5; G.numEdges = 7; // 初始化顶点 G.vexs[0] = 'A'; G.vexs[1] = 'B'; G.vexs[2] = 'C'; G.vexs[3] = 'D'; G.vexs[4] = 'E'; // 初始化邻接矩阵 int arcs[MAXVEX][MAXVEX] = { {0, 2, INFINITY, 6, INFINITY}, {2, 0, 3, 8, 5}, {INFINITY, 3, 0, INFINITY, 7}, {6, 8, INFINITY, 0, 9}, {INFINITY, 5, 7, 9, 0} }; for (int i = 0; i < G.numVertexes; i++) { for (int j = 0; j < G.numVertexes; j++) { G.arcs[i][j] = arcs[i][j]; } } // 从顶点A开始计算最小生成树 Prim(G, 0); return 0; }
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 #include <stdio.h> #include <stdlib.h> #define MAXVEX 100 // 最大顶点数 #define INFINITY 9999 // 表示无穷大 typedef char VertexType; // 顶点类型 typedef int EdgeType; // 边上的权值类型 typedef struct { VertexType vexs[MAXVEX]; // 顶点表 EdgeType arcs[MAXVEX][MAXVEX]; // 邻接矩阵 int numVertexes, numEdges; // 图中当前的顶点数和边数 } MGraph; typedef struct { int begin, end; // 边的两个顶点 EdgeType weight; // 边的权值 } Edge; int Find(int *parent, int f) { while (parent[f] > 0) f = parent[f]; return f; } void Union(int *parent, int i, int j) { parent[i] = j; } void MiniSpanTree_Kruskal(MGraph G) { int parent[MAXVEX]; // 用于判断边与边是否形成环路 Edge edges[MAXVEX]; // 存储所有边 int edgeCount = 0; // 初始化parent数组 for (int i = 0; i < G.numVertexes; i++) { parent[i] = 0; } // 将图中的所有边存储到edges数组中 for (int i = 0; i < G.numVertexes; i++) { for (int j = i + 1; j < G.numVertexes; j++) { if (G.arcs[i][j] != INFINITY) { edges[edgeCount].begin = i; edges[edgeCount].end = j; edges[edgeCount].weight = G.arcs[i][j]; edgeCount++; } } } // 按权值对边进行排序 for (int i = 0; i < edgeCount - 1; i++) { for (int j = i + 1; j < edgeCount; j++) { if (edges[i].weight > edges[j].weight) { Edge temp = edges[i]; edges[i] = edges[j]; edges[j] = temp; } } } printf("边 \t权重\n"); // 选择边并构建最小生成树 for (int i = 0; i < edgeCount; i++) { int n = Find(parent, edges[i].begin); int m = Find(parent, edges[i].end); if (n != m) { Union(parent, n, m); printf("(%c, %c) \t%d\n", G.vexs[edges[i].begin], G.vexs[edges[i].end], edges[i].weight); } } } int main() { MGraph G; G.numVertexes = 5; G.numEdges = 7; // 初始化顶点 G.vexs[0] = 'A'; G.vexs[1] = 'B'; G.vexs[2] = 'C'; G.vexs[3] = 'D'; G.vexs[4] = 'E'; // 初始化邻接矩阵 int arcs[MAXVEX][MAXVEX] = { {0, 2, INFINITY, 6, INFINITY}, {2, 0, 3, 8, 5}, {INFINITY, 3, 0, INFINITY, 7}, {6, 8, INFINITY, 0, 9}, {INFINITY, 5, 7, 9, 0} }; for (int i = 0; i < G.numVertexes; i++) { for (int j = 0; j < G.numVertexes; j++) { G.arcs[i][j] = arcs[i][j]; } } // 计算并打印最小生成树 MiniSpanTree_Kruskal(G); return 0; }
有向无环图及其应用(DAG,Directed Acyclic Graph ) 拓扑排序 照有向图给出的次序关系,将图中顶点排成一个线性序列。
检查有向图中是否存在回路的方法之一,是对有向图进行拓扑排序。如果不能进行拓扑排序,则证明该图中存在回路
无前趋的顶点优先算法 在一个拓扑序列中,每个顶点必定出现在它的所有 前趋顶点之后。
选择一个入度为0的顶点(无前趋的顶点),输出它
删去该顶点及其关联的所有出边
重复上述两步,直至图中不再有入度为0的顶点为止。
若该有向图不是无环图,则不存在拓扑排序。可以来判断一个有向图是否存在回路。
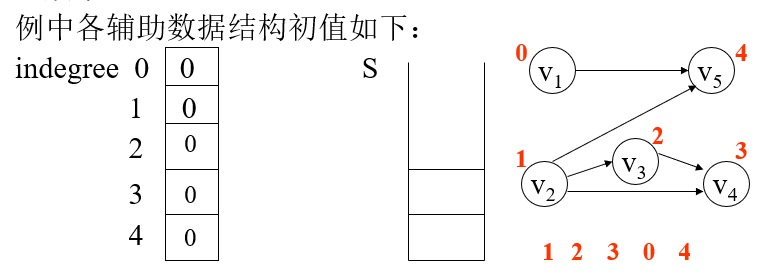
数据结构
一维数组indegree[0..n-1]:记录每个顶点的当前入度
栈S(或者队列Q):暂存当前所有待输出的入度为0的顶点。作用是避免每次扫描indegree,提高算法效率。
算法步骤
初始化辅助数据结构
扫描邻接表G的各出边表,在indegree中计数;O(n+e)
检查indegree数组,将入度为0的顶点入栈; O(n)
输出顶点计数器 count= 0; O(1)
若栈不空,反复执行以下操作
栈顶元素i出栈; O(n)
输出顶点i,count加 1; O(n)
扫描顶点i的出边表: O(n+e)
若count<顶点数vexnum则出现回路排序失败
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 Status TopologicalSort(ALGraph G) { FindInDegree(G,indegree);//求各顶点入度indegree[G.vexnum] InitStack(S); // InitQueue(Q); for (i=0; i<G.vexnum; ++i) if (!indegree[i]) push(S, i); // EnQueue(Q,i) count=0; while (! StackEmpty(S)) // (!QueueEmpty(Q)) { pop(S, i); //DeQueue(Q, i); printf(i, G.vertices[i].data); ++count; for(p=G.vertices[i].firstarc;p;p=p->nextarc) { //修改入度 k=p->adjvex; //入度为0则入栈(入队列) if(!(--indegree[k])) push(S,k); //EnQueue(Q,i) }//for }//while if (count<G.vexnum) return ERROR; else return OK; }//TopologicalSort
无后继的顶点优先算法 按逆拓扑次序生成顶点序列 在一个拓扑序列中,每个顶点必定出现在它的所有 后继顶点之前
选择一个出度为0的顶点(无后继的顶点),输出它
删去该顶点及其关联的所有入边
重复上述两步,直至图中不再有出度为0的顶点为止
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Status TopologicalSort(ALGraph G) { FindInDegree(G,outdegree);//求各顶点出度outdegree[G.vexnum] InitStack(S); for (i=0; i<G.vexnum; ++i) if (! outdegree[i]) push(S, i); count=0; while (! StackEmpty(S)) { pop(S, i); printf(i, G.vertices[i].data); ++count; //对 G.vertices[i] 顶点,找其“弧尾/初始点”k //修改k的出度 //若k的出度为0,k入栈 }//while if (count<G.vexnum) return ERROR; else return OK; }//TopologicalSort
利用深度优先遍历(从入度为0的顶点出发)
访问顶点v,并记录v已被访问
依次从v的未访问的邻接点出发,深度优先拓扑排序图G。
输出顶点v(此时v相当于无后继的顶点)
此方法仅适用于有向无环图(此算法不能检测出有向环,得到虚假拓扑序列)
关键路径 顶点(vertex)用来表示事件(event),弧(edge)用来表示活动(activity),权值表示活动所需时间(dut),称为边活动图(activityon edge network),简称AOE网(AOE图)。
[AOE网的性质]
进入Vi的活动都结束,Vi所代表的事件才能发生
顶点Vi所代表的事件发生,从Vi出发的活动才能开始
相关概念和术语 源点 入度为0的顶点,即工程的开始点
汇点 出度为0的顶点,即工程的完成点
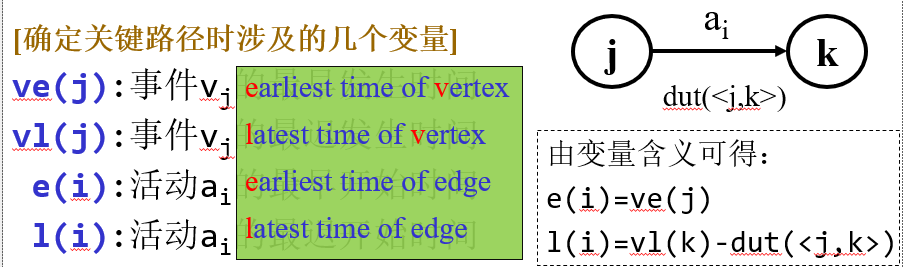
活动持续时间 活动ai由弧<j,k>表示,用dut(<j,k>)表示持续时间
关键路径 从源点到汇点的最长路径,关键路径长度=最短工期
关键活动 关键路径上的活动,关键活动的加快可以缩短工期
对于每个活动,如果它的最早发生时间等于最迟发生时间,那么这个活动就是关键活动。连接所有关键活动,就形成了关键路径。
关键活动的判断方法:e(i)=l(i)
算法步骤 辅助数组:ve(0..n-1), vl(0..n-1),e(0..m-1), l(0..m-1)
T表示栈,存储拓扑排序的顶点序列
输入所有弧的信息,建立AOE网的存储结构
计算ve[]数组值,事件的最早开始时间:
先进行拓扑排序,得到一个顶点的线性序列,满足:如果存在一条从顶点u到顶点v的有向边,那么在序列中u一定排在v的前面。
每求得一个顶点j,则使j入栈T,并调整j的所有后继的ve值
计算vl[]数组值,事件的最迟开始时间:
计算e[] 和l[]数组值,活动的最早开始时间和最迟开始时间
依据e(i)=l(i) 确定关键事件,再确定关键路径
最早发生时间ve(j) ve(0)=0
初值ve[j]=0 0<=j<=n-1
每输出一个无前驱的顶点j后,修正j的所有后继结点k的
最迟发生时间vl(j) vl(n-1)=ve(n-1){保证ve(n-1)的前提下}
此时按逆拓扑序列逐一计算
初值vl[j]=ve[j] 0<=j<=n-1
按拓扑排序结果,逆序计算 min{vl(k)- dut(<j,k>)}
求活动ai的最早开始时间e(i)和最迟开始时间l(i) 确定关键活动e(i)=l(i)
e(i)=ve(j)
算法描述 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 Status TopologicalOrder(ALGraph G, Stack &T, int * ve) //计算各顶点的最早发生时间保存在ve中,并用栈T返回G的一个拓扑序列 { FindInDegree(G, indegree);//求各顶点入度indegree[G.vexnum] InitStack(S); count=0; ve[0..G.vexnum-1]=0; for (i=0; i<G.vexnum; ++i) if (! indegree[i]) push(S, i); InitStack(T); while (! StackEmpty(S)) { pop(S, j); push(T, j); ++count; for (p=G.vertices[j].firstarc; p; p=p->nextarc){ k=p->adjvex; if (! (--indegree[k])) push(S,k); //若入度为0则入栈 if (ve[j]+(p->weight) > ve[k]) ve[k]= ve[j]+(p->weight); }//for }//while if (count<G.vexnum) return ERROR; else return OK; }//TopologicalOrder
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Status CriticalPath(ALGraph G) //G为有向网,输出G的各项关键活动 { if (! TopologicalOrder(G,T,ve) ) return ERROR; vl[0.. G.vexnum-1] = ve[G.vexnum-1] ; while (! StackEmpty(T)){ //按拓扑逆序求各顶点的vl值 for ( pop(T, j), p=G.vertices[j].firstarc; p; p=p->nextarc) { k=p->adjvex; if (vl[k]-(p->weight) < vl[j]) vl[j]= vl[k]-(p->weight); }//for for (j=0; j<G.vexnum; ++j){ //求各活动的ee、el和确定关键活动 for (p=G.vertices[j].firstarc; p; p=p->nextarc) { k=p->adjvex; dut=p->weight; ee=ve[j]; el=vl[k]-dut; tag=(ee==el) ? ’*’ :’ ’; printf(j, k, dut, ee, el, tag); } //for } //for } //while }//CriticalPath
7.6 最短路径 Dijkstra 局限性:
不能处理负权边: Dijkstra算法的核心思想是贪心算法,它假设每次选取距离源点最近的未访问节点进行扩展。但在存在负权边的情况下,这种贪心策略可能导致错误的结果。适用于稀疏图: 对于稠密图,Dijkstra算法的时间复杂度可能会较高。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 void ShortestPath_DIJ( Mgraph G,int v0, PathMatrix &P, ShortPathTable &D) { for (v = 0; v < vexnum; v++) { final[v] = FALSE; D[v] = G.arcs[v0][v]; for (w = 0; w < vexnum; w++) P[v][w] = FALSE; if (D[v] < INFINITY) P[v][v0] = p[v][v] = TRUE; } D[v0] = 0; final[v0] = TRUE; for (i = 1; i < vexnum; i++) { min = INFINITY; for (w = 0; w < vexnum; w++) if (!final[w] && D[w] < min) { k = w; min = D[w]; } final[k] = TRUE; /*考虑新加入的节点k */ for (w = 0; w < vexnum; w++) if (!final[w] && (min + G.arcs[k][w] < D[w])) { D[w] = min + G.arcs[k][w]; P[w] = P[k]; P[w][w] = TRUE; } } }
Floyd 设每个顶点都可以是中间顶点,通过该顶点都有可能使其它顶点间的距离缩短。因此,将所有顶点都作为中间顶点操作过一遍后,所得到的各顶点对间的距离即是最短距离,所得路径自然也就是最短路径了。该算法是求顶点间最短路径。
优点:
通用性强: Floyd算法可以处理任意图,包括带负权边的图,甚至可以检测到图中是否存在负权环。求解所有顶点对之间的最短路径: Floyd算法可以一次性求解图中任意两个顶点之间的最短路径。
局限性:
时间复杂度高: Floyd算法的时间复杂度为O(V^3),其中V是顶点的个数。对于大规模图,计算时间较长。空间复杂度高: Floyd算法需要一个二维数组来存储所有顶点对之间的最短路径,空间消耗较大。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 void ShortestPath_FLOYD2(Mgraph G, PathMatrix &P, DistanceMatrix &D) // P[v][w][k]为TRUE,则从v到w的最短路径中含有k节点 // D[v][w]从v到w的最短路径的长度 { for (v = 0; v < n; v++) for (w = 0; w < n; w++) { D[v][w] = G.arcs[v][w]; for (k = 0; k < n; k++) p[v][w][k] = FALSE; if (D[v][w] < INFINITY) P[v][w][v] = P[v][w][w] = TRUE; }//for for (k = 0; k < n; k++) for (v = 0; v < n; v++) for (w = 0; w < n; w++) if (D[v][k] + D[k][w] < D[v][w]) { D[v][w] = D[v][k] + D[k][w]; for (i = 0; i < n; i++) P[v][w][i] = P[v][k][i] || P[k][w][i]; }//if } // ShortestPath_FLOYD2 P191-算法7.16